Por medio de un sistema de adquisición de datos es posible determinar en tiempo real la posición, la velocidad y la aceleración de un carro que se mueve en un riel sin fricción. Se estudian los casos en donde el carro se mueve con velocidad constante y con aceleración constante.
El montaje experimental se presenta en la siguiente figura, en donde se observa el riel sin fricción con el carro, el sistema de adquisición de datos y el sensor de posición ubicado en uno de los extremos del riel mediante un soporte.
Para iniciar el experimento se da un pequeño impulso al carro con la mano (caso velocidad constante) o se inclina el riel (caso aceleración constante). Una vez que el carro se encuentra en movimientoSe registra la posición mediante el programa Data Studio de PASCO y el sensor de posición que a su vez permite calcular en tiempo real la velocidad, la aceleración y graficar respecto al tiempo estas cantidades en una sola ventana. A continuación se presentan los resultados obtenidos para los casos: velocidad constante y aceleración constante.
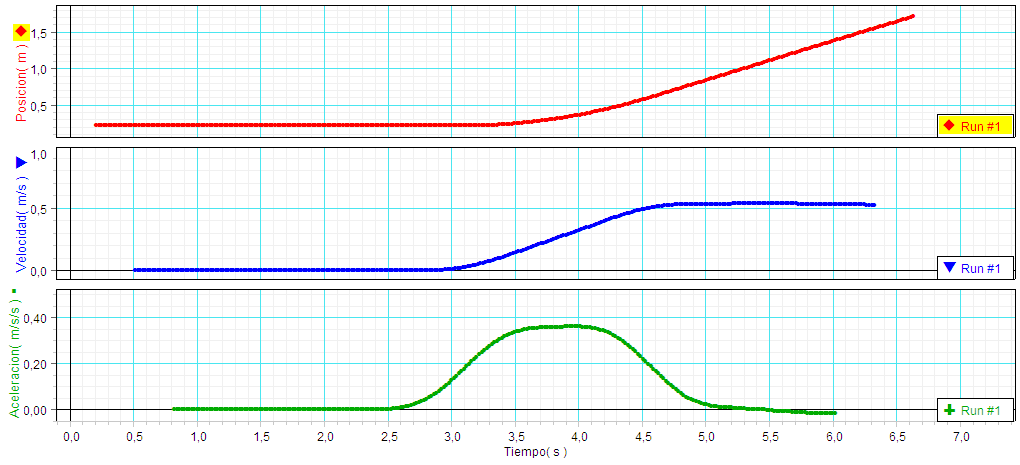
Resultado de la medición realizada con el sistema de adquisición PASCO science workshop 750 para el caso en donde el carro se mueve con velocidad constante por el riel sin fricción. Debido a que el carro parte del reposo, durante el primer segundo acelera hasta llegar a la velocidad constante con la que continúa moviéndose. En la figura se presentan las gráficas de posición, velocidad y aceleración respecto al tiempo obtenidas al realizar el experimento.
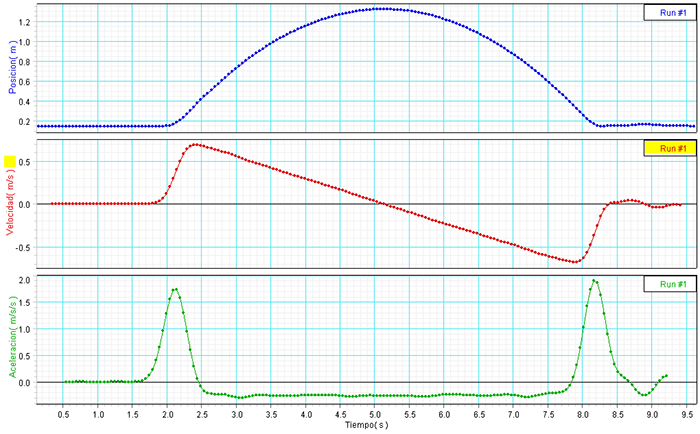
Resultado de la medición realizada con el sistema de adquisición PASCO science workshop 750 para el caso en donde el carro se mueve con aceleración constante por el riel sin fricción. En la figura se presentan las gráficas de posición, velocidad y aceleración respecto al tiempo obtenidas al realizar el experimento.
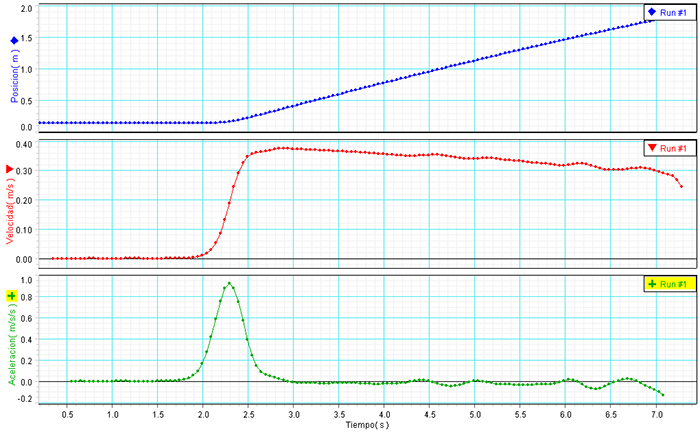
En el siguiente gráfico se presenta el resultado de la medición realizada al aplicar una fuerza que depende del tiempo al carro. La fuerza corresponde a un escalón que arranca en un valor constante que dura aproximadamente 1.5 segundos y posteriormente es cero.
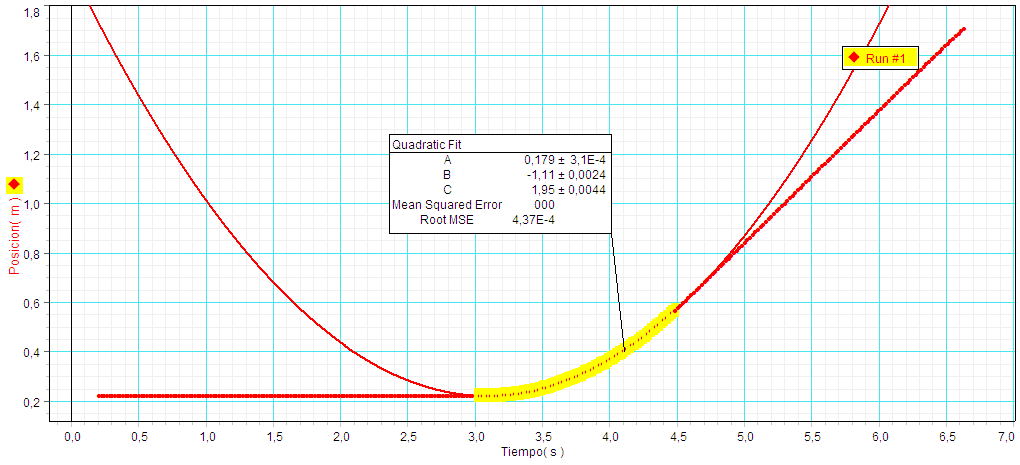
Detalle de la gráfica de posición respecto al tiempo, en donde se observa que en los primeros 1.5 segundos (a partir de 3.0s) el comportamiento de la posición es cuadrático en el tiempo. Posteriormente varía de forma lineal.